
I recently had to remove the speedometer from our '62 Corvette because it was making noises that sounded like a bad bushing. I took it to a local shop for a re-build, and got to thinking about what it would take to convert the old mechanical speedometer to all-electronic.
I had done some work with the Arduino micro computer in controlling servos, so I thought I could use a servo to control the speedometer needle and use an LCD display to replace the mechanical odometer.
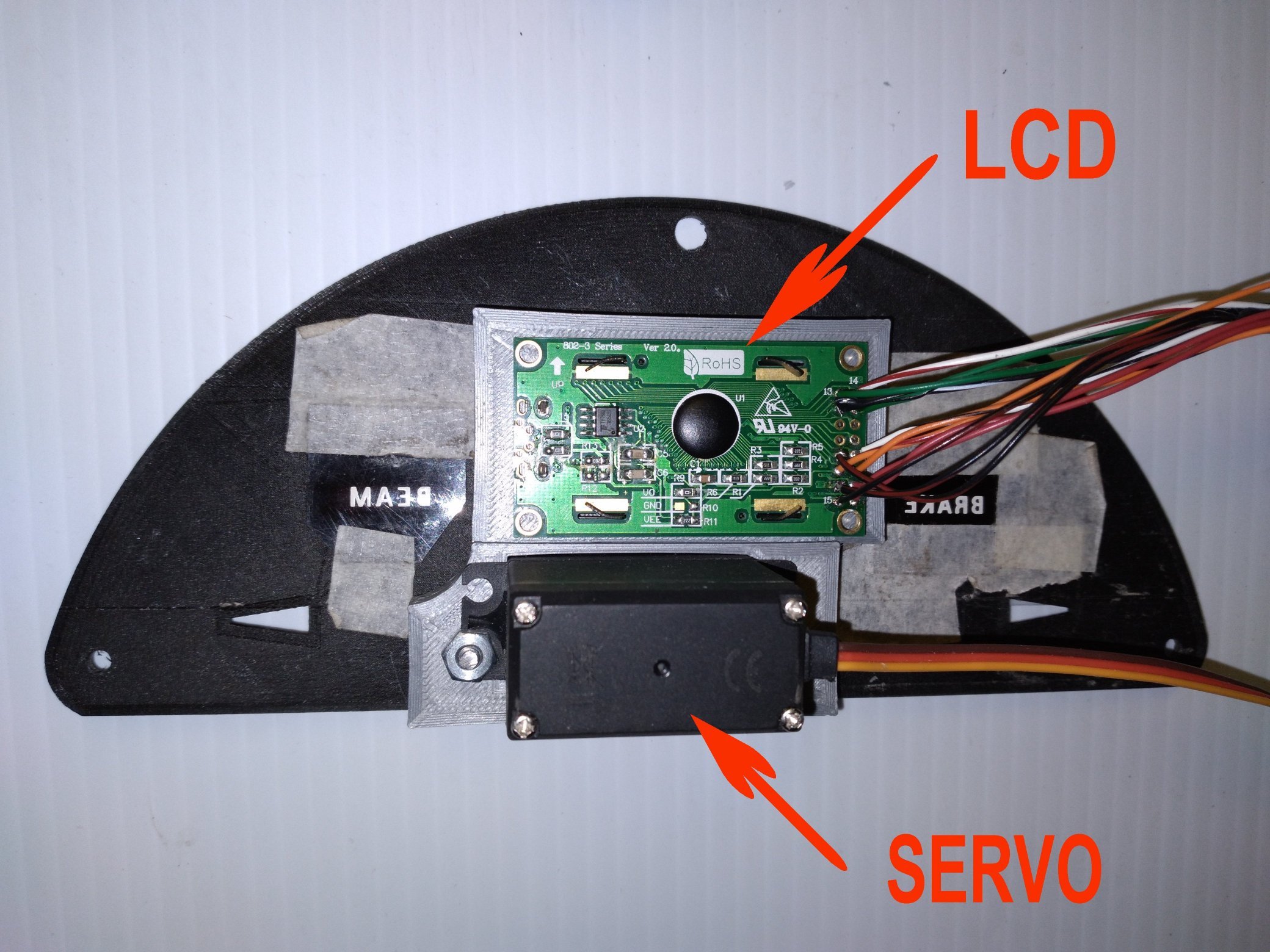
The odometer was replaced with an 8x2 (8 character x 2 rows) LCD display. The top row of numbers is the odometer and the bottom row is a re-settable trip meter and speed readout. The trip meter can be set to zero by pressing a button at any time while the display is on. I made the face plate with my 3D printer.
The next picture is the backside of the speedometer face, showing the LCD display and the servo.
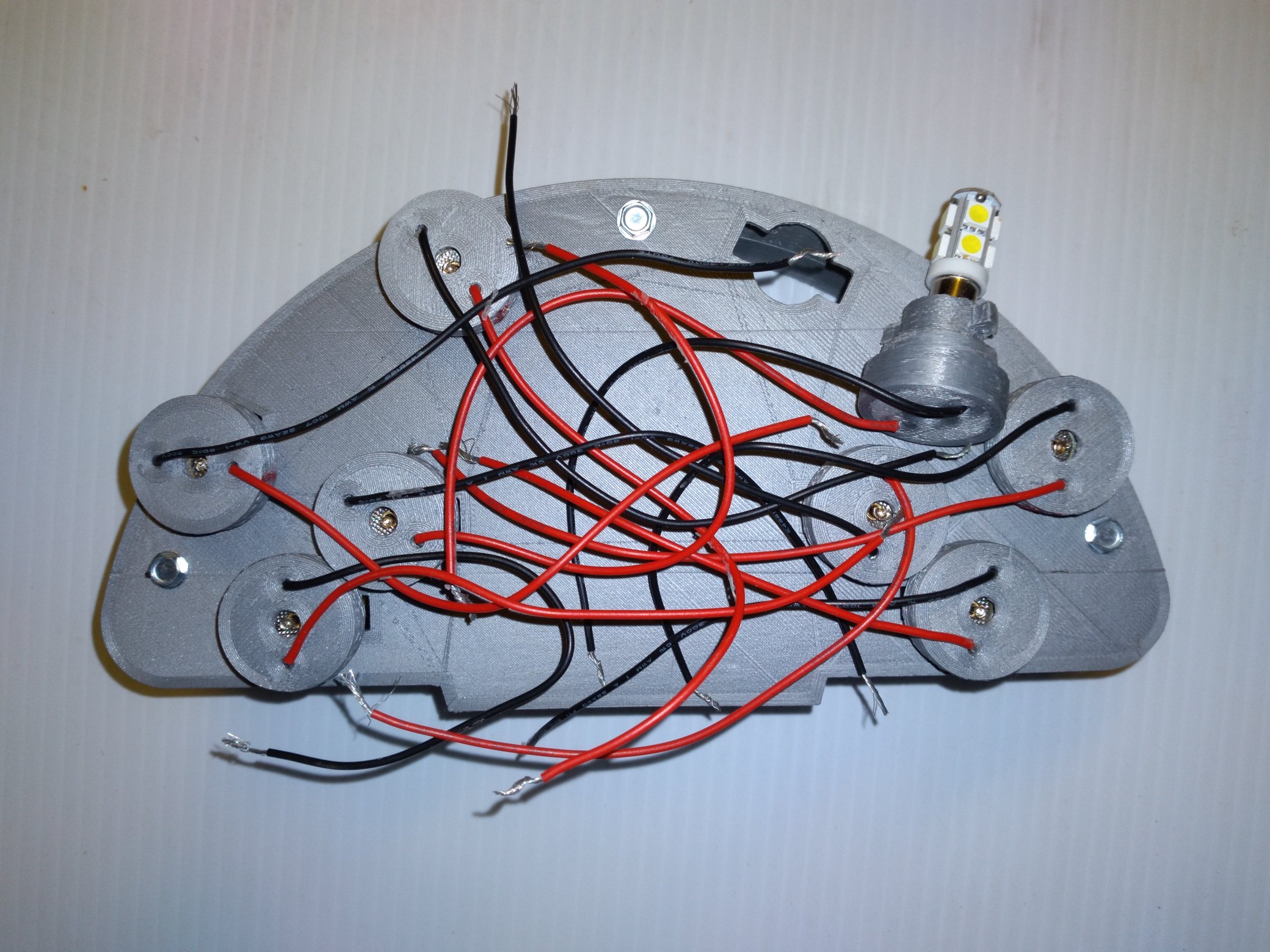
The next picture is the back side of the speedometer case, which I also made on my 3D printer. I used LED lights for the back lighting, turn signals, brake, and high beam indicators. I made the LED light sockets and extended the lamps so that they would be closer to the speedometer face, hopefully so that the lights would be brighter than the stock incandescent bulbs which were mounted on the back of the original case. Notice that I added two additional lights for the backlighting.
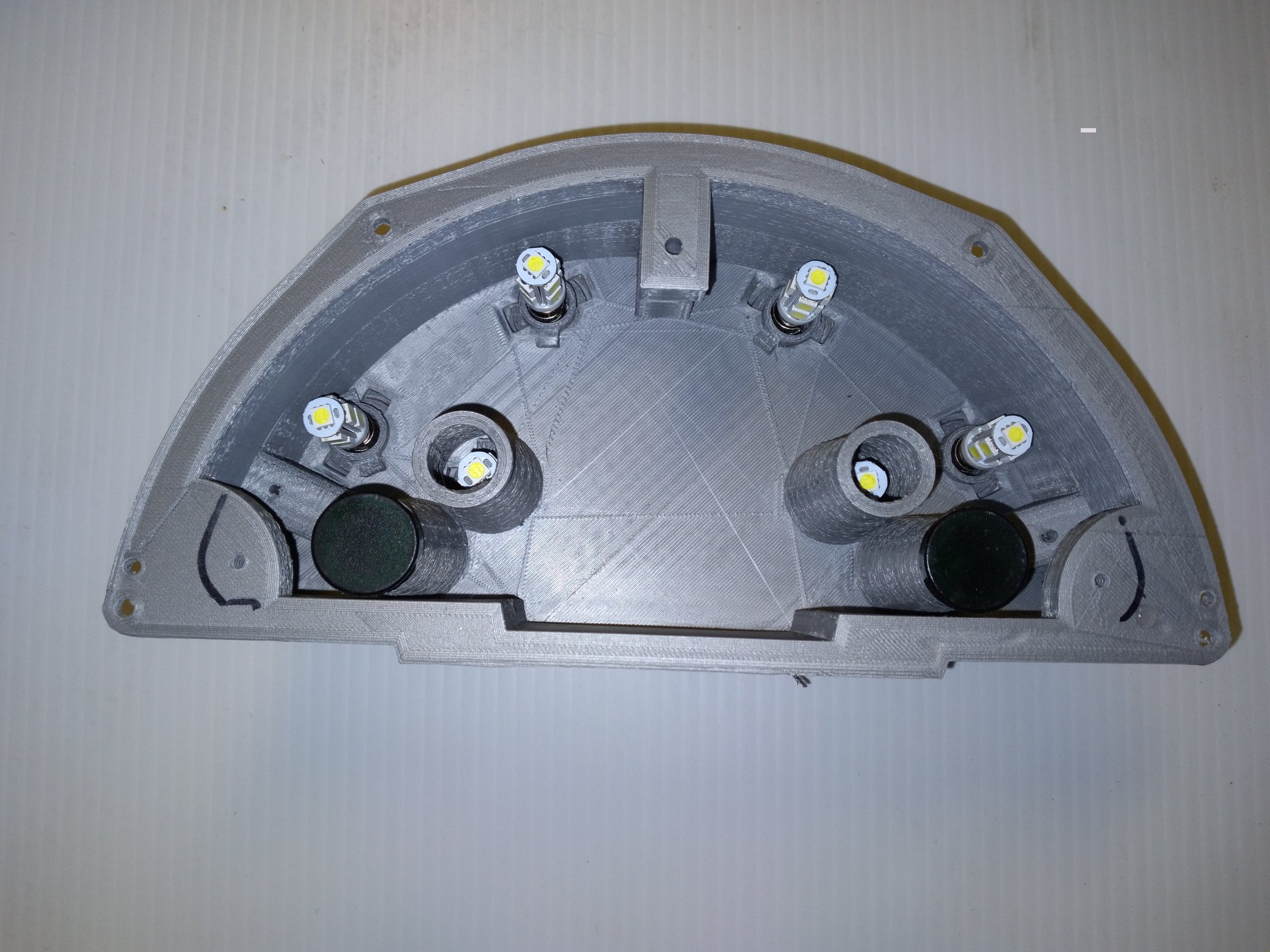
Below is a picture of the inside of the case. You can see how much closer the LED lights are to the face plate than the original bulbs.
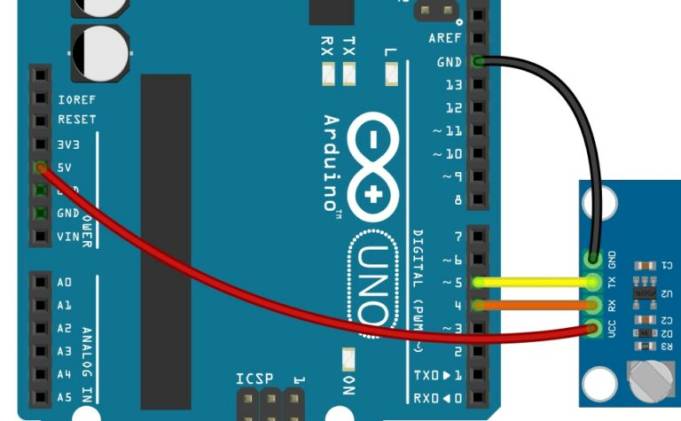
Originally I had planned to drive the speedometer by using a Hall effect sensor that would read the front wheel speed, but then I decided to use a small GPS unit for the speed and distance input. The GPS unit is a NEO-6M with a small external antenna. I ran into a problem using the Servo library that comes with the Arduino. The code for the GPS worked correctly and the code for the Servo worked correctly, but when combined the servo seemed to have a mind of it's own. Seems like there was some sort of conflict between the Servo library and the GPS library. I switched to the TinyGPSPlus library and that solved the problem.
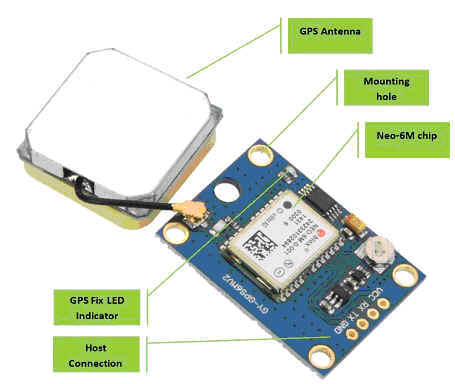
The GPS unit is wired to the Arduino Uno microcomputer.
Speedometer Completed
